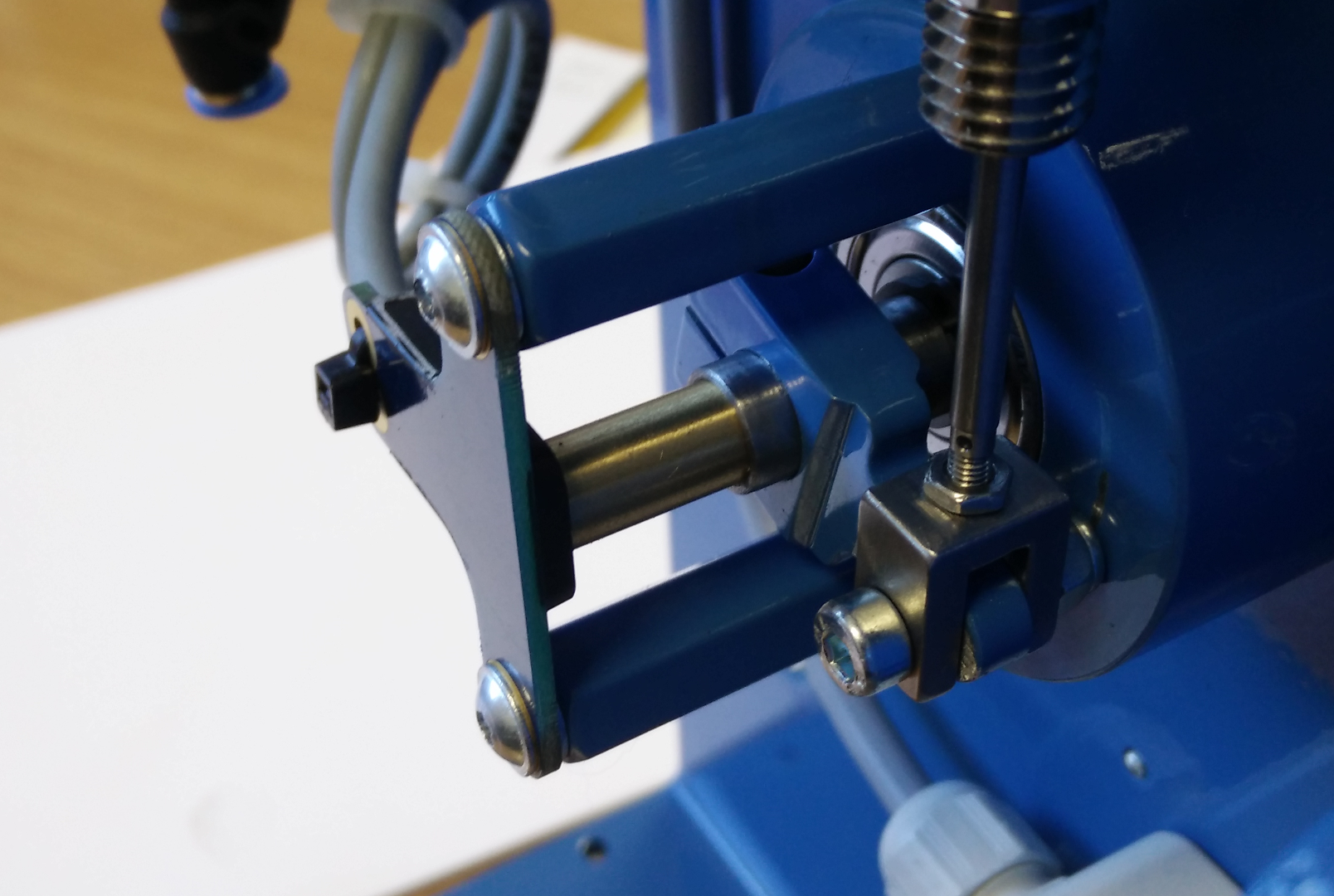
Häufig werden so genannte Tänzer eingesetzt um ein Endlosprudukt, welches sich gerade in der Fertigung befindet, mit einer definierten Zugkraft zu beaufschlagen. Dabei handelt es sich um einen Hebelarm, der drehbar gelagert ist und an dessen Ende eine Umlenkrolle montiert ist, um die das Endlosprodukt verläuft. Zusätzlich ist noch entgegen der Richtung in die ein strammes Produkt den Tänzer auslenken würde z.B. ein Pneumatikzylinder oder eine Feder montiert. Dadurch lässt sich eine bekannte (und häufig auch steuerbare) Kraft auf den Tänzer übertragen, die sich so auch auf das Entlosprodukt überträgt und letztendlich die Zugkraft vorgibt.
Nun handelt es sich nicht um statisches System, da sich das Produkt bekanntermaßen bewegt. Um die Zugkraft auch in der Bewegung konstant zu halten werden die Motoren oder die Bremsen so geregelt, dass der Tänzer möglichst in Mittellage verbleibt. Der Motor einer Abwickelmaschine würde also z.B., wenn das Produkt gespannt wird und deren Tänzer in dessen Folge aus dem Mittellage heraus gezogen würde, leicht nachgeben um eben diesen wieder in die Mittellage zurück zu bewegen.
Eine Herausforderung ist es die aktuelle Lage des Tänzers zu bestimmen um mit diesem Messwert den Regelkreis zu versorgen. Es gibt hierfür unterschiedliche Verfahren. Unser Verfahren bietet einige Vorzüge:
- Es ist berührungslos und somit keinem Verschleiß ausgesetzt.
- Ein Sensor lässt sich in wenigen Sekunden einteachen.
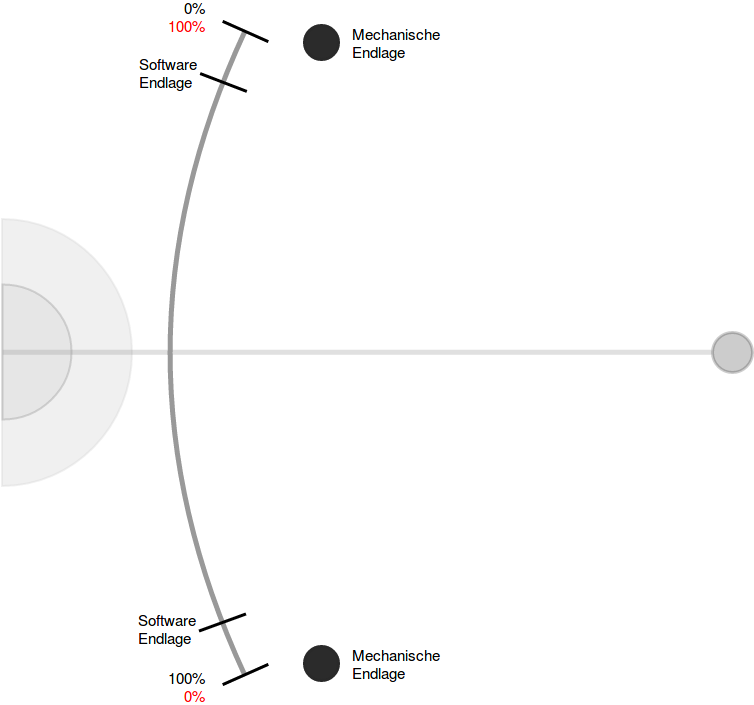
- Softwareendlagen werden automatisch erstellt
- Der Messbereich ist flexibel einstellbar
- Es lassen sich 4 gängige Signalformen auswählen
- Die Endlagensignale sind als eigene Drahbruchsichere Ausgänge herausgeführt
- Der aktuelle Messwert sowie der Wert des Ausgangssignals werden auf dem Display dargestellt
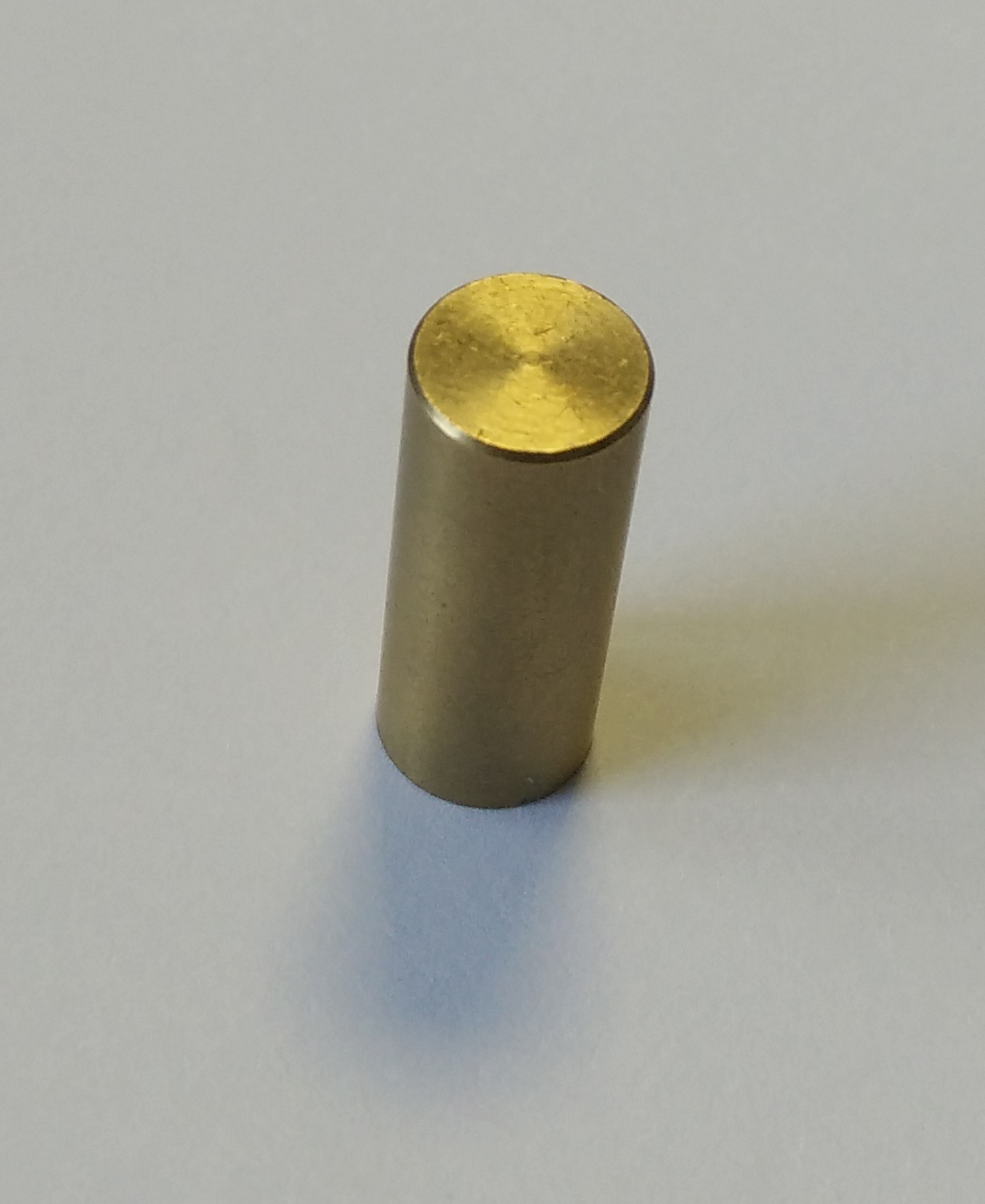
Ein kleiner Gebermagnet mit Passung wird in die Drehachse integriert. Darüber wird der Sensor montiert, der die Ausrichtung des Magnetfeldes misst. Die jeweilige Ausrichtung des Magneten spielt dabei keine Rolle. Es ist nur wichtig, dass sich die Drehachse möglichst mittig und innerhalb des zulässigen Abstandes (1mm) über dem Sensor befindet. Während der Inbetriebnahme des Sensors wird die Signalstärke des Gebermagnetfeldes angezeigt, sodass sich der Abstand zwischen Geber und Sensor optimal einstellen lässt.
Der Sensor selbst wurde ebenfalls möglichst klein aufgebaut und ist mit einem 40cm langen Kabel am Auswertemodul mit LCD-Display angeschlossen. Dieses wird per 5-poligen M12 Stecker an das übergeordnete System angebunden. Die Belegung lautet dabei wie folgt:
- 15V…35V DC (braun)
- Analogausgang (Wählbar: 4..20mA, 0..20mA, 0..10V, 0..5V) (weiß)
- Masse (blau)
- Unterschreitung des minimlalen Wertes (schwarz)
- Überschreitung des maximalen Wertes (grau)
Das System lässt sich sehr schnell einstellen, was in diesem Video an unserem Vorführtänzer demonstriert wird.
Dazu werden zunächst die beiden Endlagen angefahren und eingeteacht. Danach wird bei einer Endlage (welche ist egal) ein Sicherheitsabstand ausgewählt. Zuletzt wird noch die Art der Analogausgabe ausgewählt und fertig.